|
I am doing my PhD in Electrical and Computer Engineering at Purdue University, advised by Dr. Yu She in the Mechanisms And Robotic Systems (MARS) Lab. Previously, I did my MS in Computer Engineering at IUPUI, advised by Dr. Zina Ben Miled in the Data-Driven Knowledge Discovery (D2KD) Lab. I did my undergrad in Mechatronics Engineering at Chittagong University of Engineering and Technology (CUET). I am interested in Robot Learning and Tactile Sensing. |

|
|
|
|
|
MVP-Tac: A Miniaturized Dual-Modal Vision and Photoelastic Tactile Sensor for Robot-Assisted Minimally Invasive Surgery
Patent in preparation, 2026
|
|
FibTac: A Pneumatic Fiber-Based Tactile Gripper for Embodied Sensing and Manipulation
Patent in preparation, 2025
|
|
|
|
Paper forthcoming Technical details, images, and extended descriptions are intentionally omitted due to an active patent application. |
|
TacVLA is a tactile-enhanced Vision-Language-Action model for robotic manipulation. By using contact-aware gating to activate tactile input only during contact, it improves fine-grained manipulation, achieving higher success in disassembly, in-box picking, and occluded tasks. |
|
This work studies tactile sensing for robotic disassembly in simulation and real-world tasks. Compared with vision alone, tactile force-field input gives the best results, especially in contact-rich and deformable scenarios, showing its strong value for reliable disassembly. |
|
Visuals withheld
(Patent pending) |
Paper forthcoming Technical details, images, and extended descriptions are intentionally omitted due to an active patent application. |
|
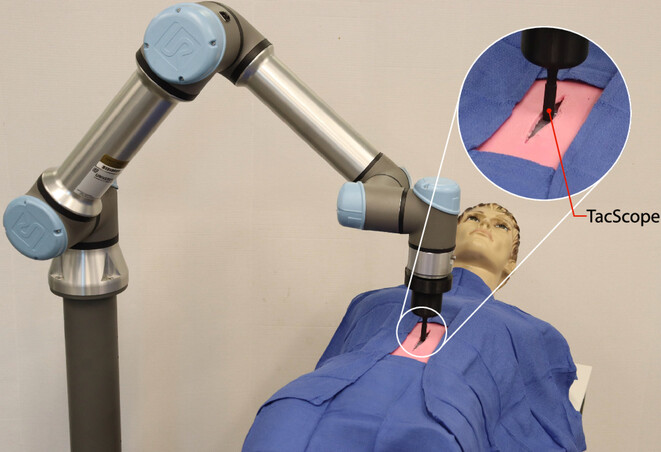
TacScope is a compact, low-cost vision-based tactile sensor designed to restore palpation in robot-assisted minimally invasive surgery. Using a spherical elastomer and particle-density variations, it reconstructs high-resolution 3D geometry with single-image calibration. TacScope detects surface and subsurface abnormalities and integrates easily with surgical robots, achieving up to 100% accuracy for rigid tumors and over 96% for soft tumors in phantom studies. |
|
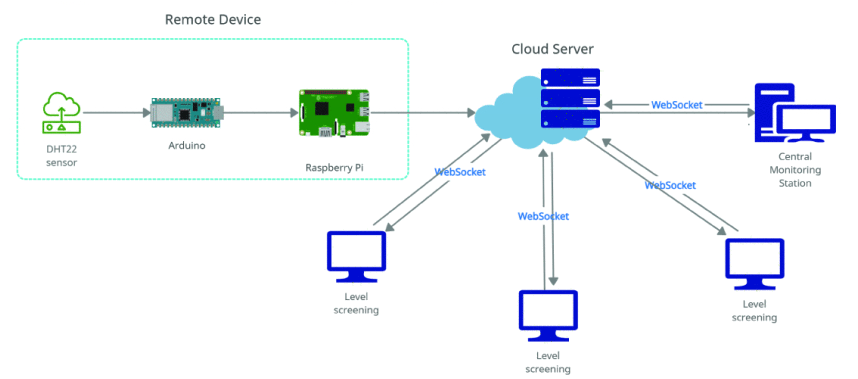
This paper proposes the development of a portable, cost-effective monitoring device for underground coal mines, leveraging Internet of Things (IoT) technology, embedded data mining, and edge network alarm services to measure and monitor environmental conditions such as temperature and humidity, which are critical for worker safety. Utilizing an event-triggering mechanism for data transmission, the system enables real-time data processing and decision-making to prevent accidents caused by excessive humidity and temperature. |
|
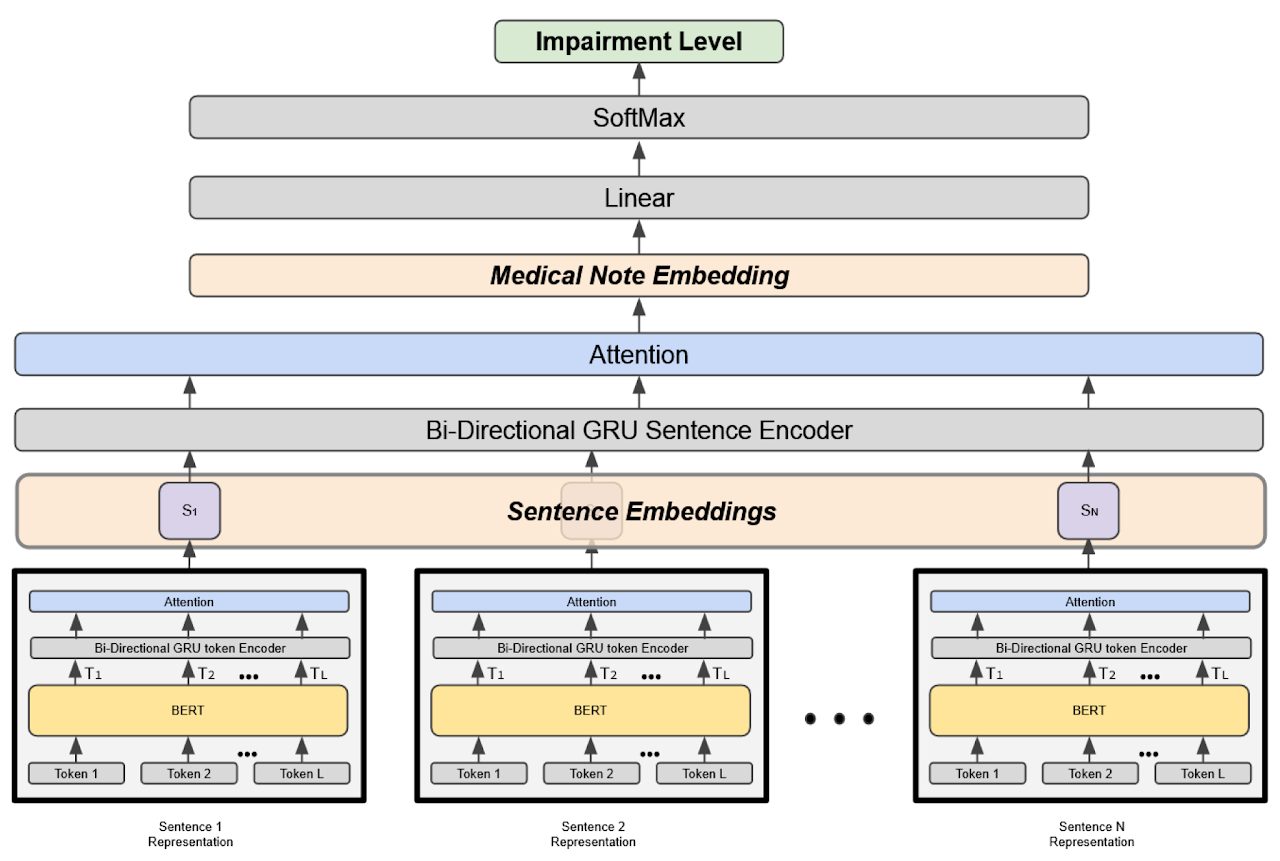
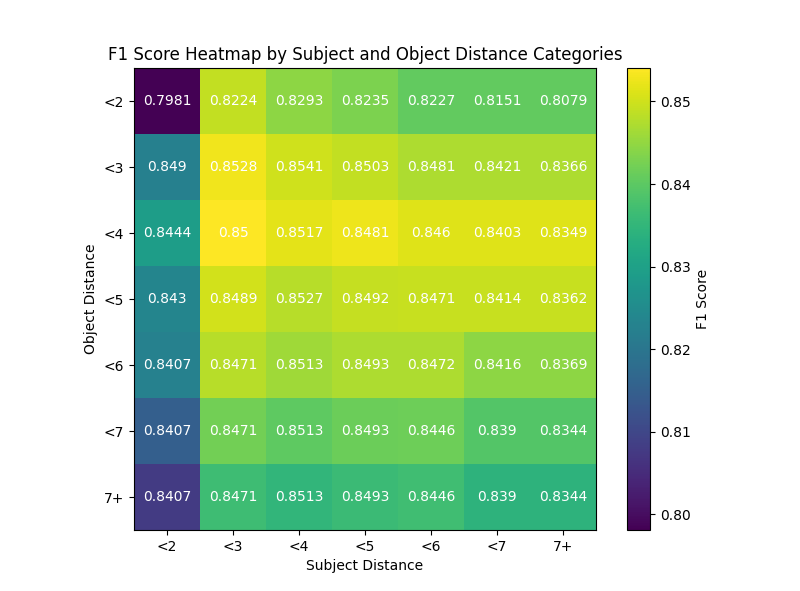
In this study, a digital-reported outcome (DRO) system utilizes a hierarchical BERT architecture to process medical notes from patients with bipolar disorder and schizophrenia, extracting sentence-level embeddings through token-level attention and aggregating them into a note-level embedding via sentence-level attention. A feed-forward neural network then classifies this comprehensive embedding to determine the level of functional impairment in daily activities based on the General Assessment of Functioning (GAF) scale. |
|
|
|
[Presentation] [Video] [Github] This study explores RRT/RRT* and cubic spline methods for optimal manipulator trajectory generation in complex environments for a three-DOF manipulator. Kinematics were modeled using D-H parameters and validated with MATLAB Robotics Toolbox and Monte Carlo workspace analysis. |
|
[Video] [Github] [Featured on TV] [Award receiving ceremony] A soccer bot is a type of robot designed to play soccer. We were the very first university organization (RMA) who organized national level Inter-University soccer bot competition named "RMA FootBot" in our country. And my team "CUET Mechatrons" also became 2nd Runners Up of that competition among 60+ teams participated from all over the country. We (team "CUET phenomenal") were also featured in a very renowned national television channel named "Channel i" in a show called "GPH Ispat Esho Robot Banai" (Translation: "Let's build robots") to take part in a friendly competition as a part of a hack-a-thon round. |
|
|
|
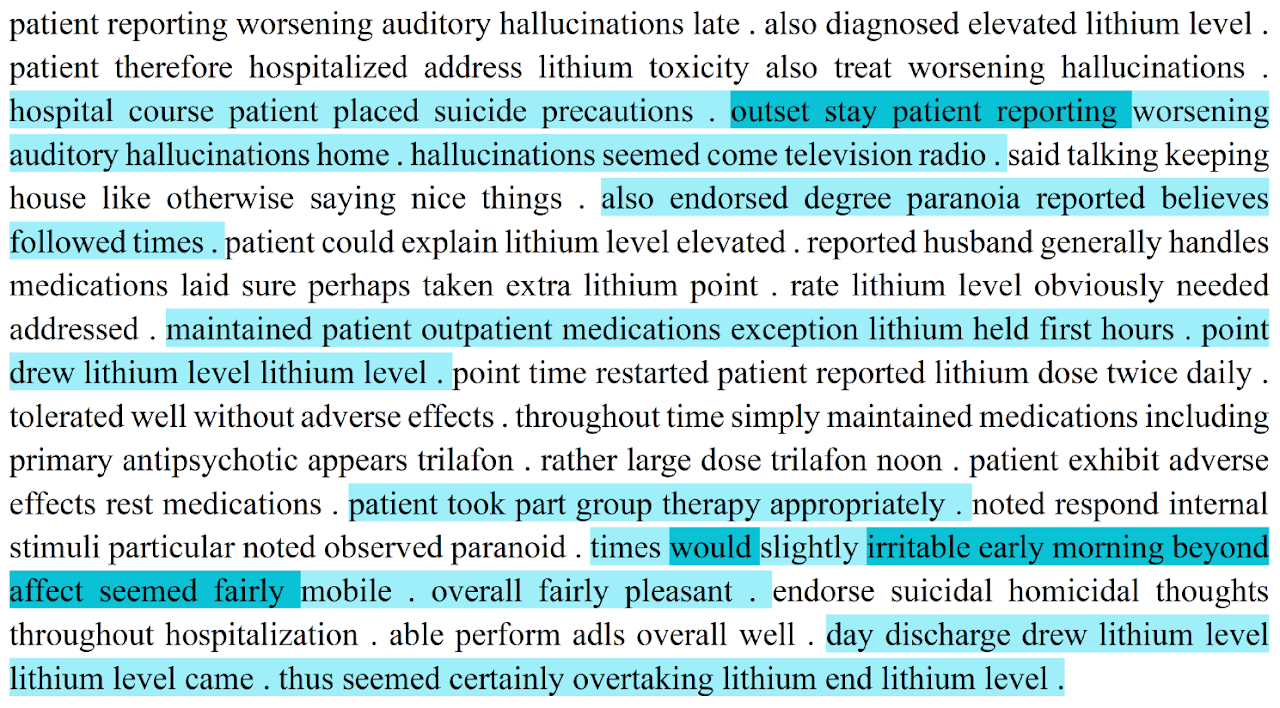
Tools/Stack: NLP | LLaMA2 | Mistral | ELECTRA | BERT | Clinical Bio-BERT | MedBERT | LSTM | DFICF | PyTorch | HPC | Architecting a multimodal fusion model to make Passive Digital Marker (PDM) for dementia patients leveraging structured data (e.g., demographic data, diagnosis, or medication codes) along with unstructured clinical notes by integrating pretrained MEDBERT with LLaMA2, ensuring comprehensive data analysis and model reliability. Applying advanced statistical techniques, PEFT and LoRA, to develop Passive Digital Markers, achieving a diagnostic accuracy of 74% for early detection of individuals potentially at risk for conditions such as Dementia. Constructing a full-spectrum statistical model pipeline, encompassing stages from data extraction to model deployment. |
|
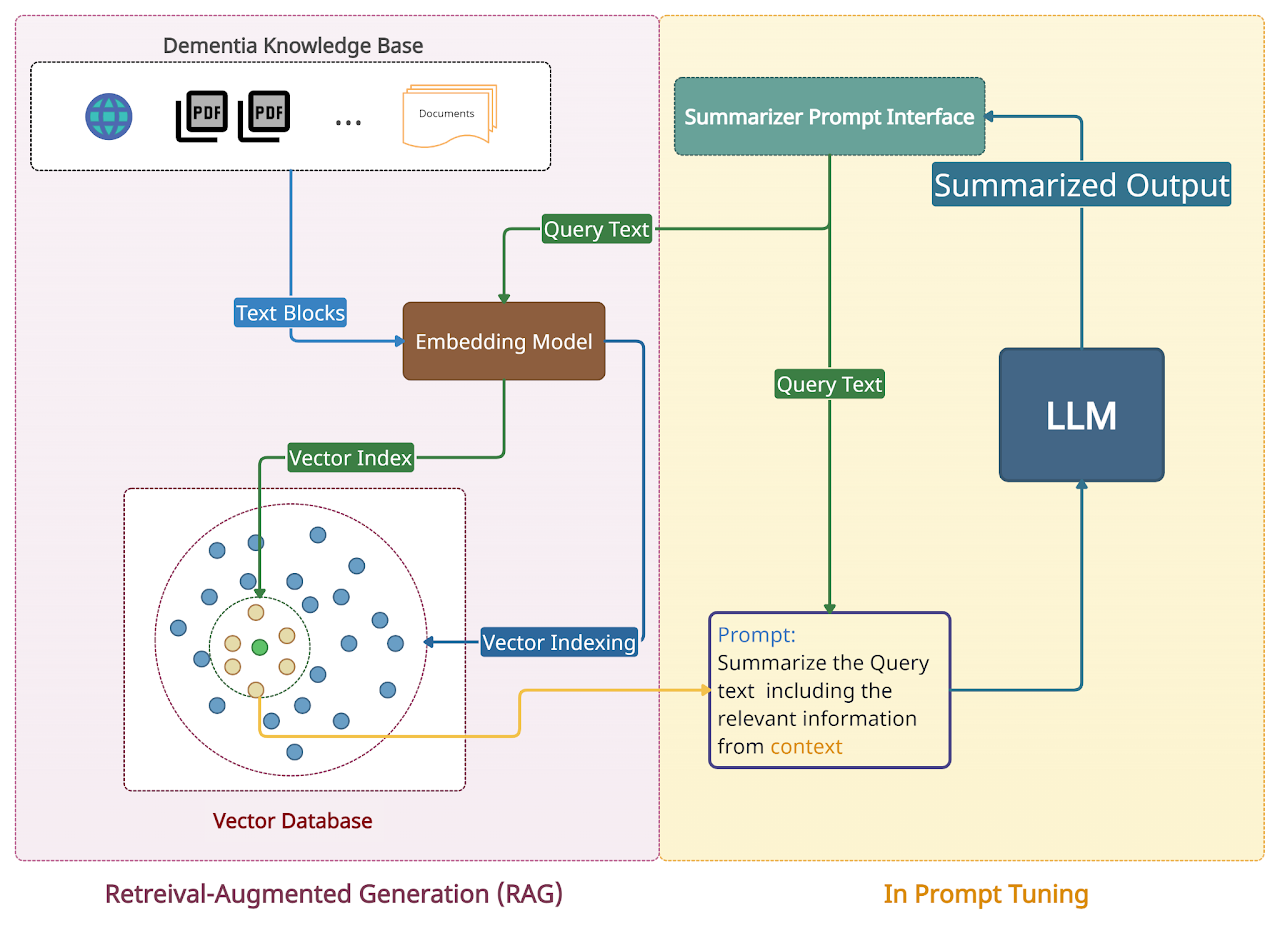
Tools/Stack: SBERT | Longformer | Falcon | FLAN-T5 | ELECTRA | RoBERTa | OpenAI API | NLTK | TensorFlow | Pandas | (Project description retained as in the PDF export. Replace here with your final text if you want a refined, corrected summary.) |
|
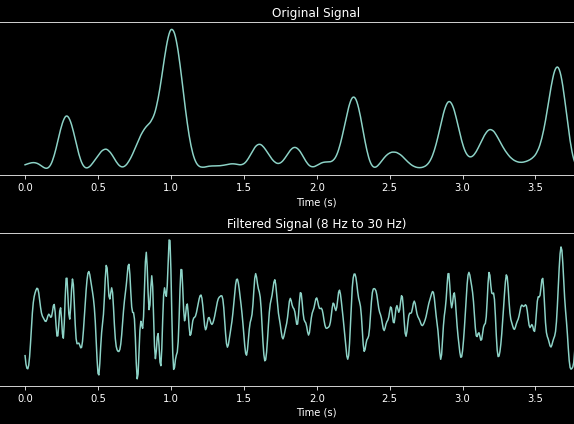
Tools/Stack: Pytorch | CNN | ResNet | SciPy | MATLAB | Numpy | Scikit-learn | Matplotlib | Designed and developed a Convolutional Neural Network (CNN) to perform EEG-based classification of motor imagery tasks, demonstrating proficiency in deep learning methodologies. Employed advanced data visualization techniques to interpret model predictions, providing insights beyond conventional numerical metrics and enhancing understanding of model performance and error analysis. Achieved a high classification accuracy of 90% through iterative design, rigorous model evaluation, and hyperparameter tuning, demonstrating an effective understanding and application of machine learning principles. |
|
|
|
|
[Presentation] [Video] [Github] This study explores the application of Rapidly Exploring Random Tree (RRT) and RRT* algorithms alongside cubic spline methods for optimal manipulator trajectory generation in complex environments, focusing on a three-degree-of-freedom robotic manipulator whose kinematics were modeled using D-H parameters and validated through MATLAB's Robotics Toolbox and Monte Carlo workspace analysis. The research validates the manipulator's analytical model through both simulated environments in MATLAB and real-world experiments, laying a foundational framework for further studies in trajectory planning and motion control. |
|
Neurological disorders present a considerable challenge due to their variety and diagnostic complexity, especially for older adults. Early prediction of the onset and ongoing assessment of the severity of these disease conditions can allow timely interventions. Currently, most of the assessment tools are time-consuming, costly, and not suitable for use in primary care. To reduce this burden, the present thesis introduces passive digital markers for different disease conditions that can effectively automate the severity assessment and risk prediction from different modalities of electronic health records (EHR). |
|
Selected CAD designs (click a card to view on GrabCAD). |


|
All rights reserved by Md Rakibul Islam Prince |